

포스코그룹은 안전과 탄소저감에 기여하는 기술을 개발하고자 최선을 다하고 있습니다. 더 나은 사회를 만들어가는 포스코그룹의 우수한 신기술을 소개합니다. 이번 편에서는 제철소 고위험 개소에서 작업자의 점검 업무를 대신해 주는 포스코의 4족 보행 로봇솔루션을 소개합니다. 포스코그룹 신기술에 대한 수다를 계속 이어가는 기술+잇+수다, 지금 시작합니다!

4족 보행 로봇솔루션은 제철소 내 작업자가 직접 하게 되는 고위험 수작업을 로봇이 대신해 작업자는 안전하게 본연의 업무에 집중할 수 있도록 돕는 스마트 제철소 실현에 꼭 필요한 기술입니다. 해당 기술은 제철소 현장의 문제 해결을 위해 포스코 기술연구원 로봇솔루션연구그룹에서 2022년 연구 및 개발에 착수해 현재는 포스코홀딩스 미래기술연구원 AI로봇융합연구소 산하 지능제조로봇연구센터에서 기술고도화를 담당해 오고 있습니다.

제철소에서는 늘 주기적이고 꼼꼼한 설비점검이 필수인데요. 설비점검은 각종 사고를 예방하고 생산 설비를 최적의 상태로 유지하는 중요한 작업이지만, 일부 설비는 작업자의 접근이 어려운 환경에 놓여 있어 항상 안전사고에 경각심을 가져야 했습니다. 지능제조로봇연구센터는 현장에서 설비 점검에 힘쓰는 직원의 안전 리스크를 제거하는 것은 물론, 업무 생산성 또한 높이고자 로봇 공정 지식을 바탕으로 로봇 하드웨어, 제어 소프트웨어, 스마트 센서와 AI 기술 등을 통합하는 4대 로봇 솔루션(고정형·이동형·원격운전·플랫폼)을 개발해 오고 있습니다.
그중 4족 보행 로봇솔루션은 사람 대신 제철소 내 고로 풍구* 설비점검 경로를 따라 자율 주행하면서 점검 데이터를 자동으로 수집하고 이상 상황을 감지하는 역할을 하는데요. 기존 바퀴형 이동 로봇과 비교하면 턱이나 계단 같은 장애물에 제약을 덜 받고, 움직임이 자유로워 감시 범위를 극대화할 수 있는 장점이 있습니다.
*풍구 : 고로 내에 열풍을 불어넣는 통로.


제철소에는 설비 상태를 모니터링할 수 있는 고정식 센서와 CCTV가 여러 곳에 설치되어 있습니다. 하지만 고정식 센서들은 감시 영역이 제한적일 수밖에 없죠. 그렇다고 감시 영역을 확대하고자 고정식 센서의 대수를 늘리기에는 제철소라는 한정된 공간에 따른 제약이 있어 설치하기 어렵습니다. 결국에는 작업자가 수시로 설비에 접근해 측정 기구를 이용해서 육안으로 설비 상태를 점검해야 하는데, 설비와 기존 측정 방식 특성상 설비 사이의 협소 공간 때문에 작업 영역을 확보하기 어려우며, 작업자가 고온 가스 분진·화상 위험 요소에 노출되는 안전 리스크도 컸습니다. 이에 포스코는 이런 위험을 줄이고 점검은 더욱 철저하게 할 방법을 강구하다가 제철소 위험 설비를 무인 점검하는 4족 보행 로봇솔루션 연구개발을 본격적으로 착수했습니다.

![]()
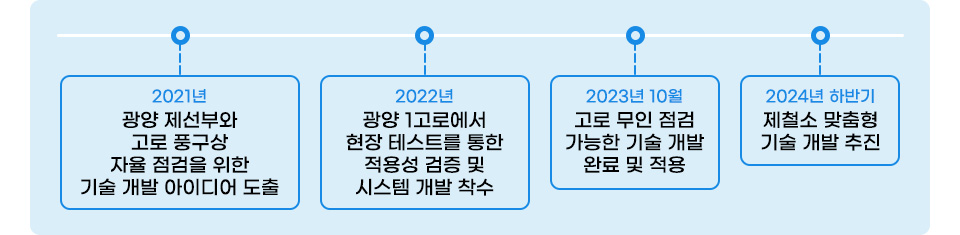
4족 보행 로봇의 제철소 적용은 2021년 광양제철소 제선부에서 고로 설비 점검의 무인화에 대한 필요성을 제기하면서 여러가지 아이디어 중의 하나로 발굴되었고 1고로에서 현장 적용 테스트를 하면서 본격적으로 연구개발이 시작됐습니다. 테스트 당시, 고로용 송풍지관에서 제철소 첫 임무를 수행했죠.
고로용 송풍지관은 1200℃에 달하는 고온의 공기를 풍구를 통해 내부로 불어넣기 위한 설비로, 고로 조업 중 발생하는 고온과 압력 및 진동에 따른 설비 손상이나 변형, 가스 또는 냉각수 누출이 발생할 가능성이 있어 안전사고 위험이 늘 잠재적으로 존재하는 설비입니다. 기존에는 혹시라도 일어날 대형 설비 사고를 사전에 예방하고자 작업자가 직접 44개나 되는 송풍지관 외피 온도를 측정하기 위해 풍구지관에 가까이 다가가 육안으로 수시 점검해 왔습니다.
하지만 설비 뒤쪽의 온도 측정이나 전체의 정확한 온도 변화와 추이를 확보하기란 어려웠으며 또한 점검을 진행하더라도 작업자가 화상이나 가스 중독 등의 위험에 노출되는 문제가 있어 작업을 대신할 기술개발이 필요했던 건데요.
이에 현장 적용 테스트를 기점으로 사람이 직접 현장에 나가지 않아도 설비점검이 이루어질 수 있도록 4족 보행 로봇이 사람 대신 설비점검 경로를 따라 자율 주행하면서 점검 데이터를 자동으로 수집하고 이상 상황을 감지할 수 있는 무인 점검 시스템 개발을 추진합니다.
![]()
기술개발 동안에는 외부 현장에서의 활약상으로 기술력을 입증한 바 있는데요. 2022년 봄, A사에서 발생한 화재 사고 현장에 4족 보행 로봇이 지원 요청을 받아 현장에 투입됐고, 사고를 수습하는 데 큰 역할을 한 것이죠. 현장 감식 전문가들이 건물 내부로 진입하기 전, 4족 보행 로봇이 먼저 화재 현장에 진입해 구조 안전성과 주요 지점 상태를 수집한 후 전문가들에게 점검 데이터를 제공했습니다. 전문가들은 이 데이터를 기반으로 현장 상황을 파악하고 안전한 진입 경로를 설정할 수 있었다고 합니다.
▲화재 현장에서 4족 보행 로봇으로 수집한 건물 내부 열화상 영상.
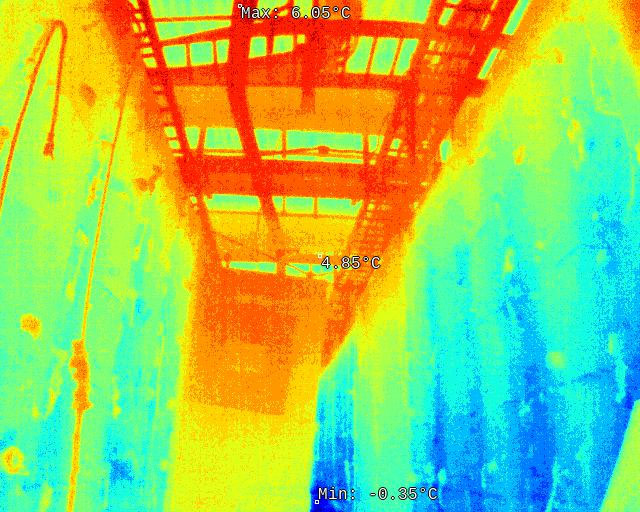
그렇다면 제철소 내에서의 활약은 어땠을까요? 장애물에 따른 이동 제약 또한 크게 줄어든 장점을 갖춘 4족 보행 로봇은, 무인화 테스트에서 풍구상을 자율 주행하며 44개 송풍지관의 데이터를 자동 수집했습니다. 작업자는 사무실에서 원격으로 로봇을 제어하며 송풍지관의 세밀한 열화상과 영상 데이터를 수집할 수 있게 된 거죠. 이를 기반으로 이상온도 유무 또한 일정 시간 주기로 체크할 수 있었습니다.
![]()
이렇듯 4족 보행 로봇이 보여준 성과는 훌륭했지만, 완벽한 설비점검 무인화를 실현하려면 개선해야 할 부분도 존재했습니다. 외부의 검증된 완성도 높은 로봇 하드웨어를 도입했지만, 연구원들의 노력에 따른 다양한 소프트웨어 기술의 내재화는 물론, 이를 제철소 맞춤형 솔루션으로 최적화하거나 제철소의 특수 환경에 맞는 로봇 솔루션으로 자체 개발하는 기술 보완이 필요했던 것이죠.
현재 제철소 설비점검 기술개발에는 미국 보스턴다이나믹스사(Boston Dynamics)의 4족 보행 로봇 ‘스폿(SPOT)’을 도입·활용하고 있는데요. 스폿은 현존하는 4족 보행 로봇 중에서도 완벽한 하드웨어를 자랑하지만, 단일 모델로만 출시돼 크기와 성능을 다양한 설비 환경에 맞춰 효율적으로 조절하기는 어려웠습니다. 따라서 제철 설비 진단에 접근성이 제한된다는 문제가 있었죠. 포스코는 이런 문제점을 개선해 기술 내재화를 통한 ‘포스코형’ 4족 보행 로봇을 만들고자 2023년 6월, 국내 로봇 전문 기업과 MOU를 맺고 제철소에 특화된 맞춤형 4족 보행 로봇 개발을 추진하고 있습니다.

▲미국 보스턴다이나믹스사의 4족 보행 로봇 스폿(왼쪽)과 국내 로봇 전문 기업이 개발 중인 4족 보행 로봇.
2023년 11월에는 고로를 무인 자율 점검할 수 있는 맞춤형 솔루션 개발에 성공하는데요. 해당 솔루션은 제철소 작업 환경에 맞춰 제작돼 상당히 정교하고 고도화된 것으로 평가받고 있습니다. 현재는 광양 1고로 풍구상에서 사람을 대신해 위험한 작업 현장에 뛰어들어 그 임무를 충실히 수행하고 있습니다.

포스코는 제철소 고위험 개소의 위험 작업을 작업자 대신 로봇이 수행하게끔 AI 로봇을 투입하는 등 제철소의 로봇화를 가속화하고 있습니다. 이에 따라 4족 보행 로봇 솔루션 또한 제철소 곳곳에 활발하게 도입 및 활용될 예정인데요. 현재 고로 점검에 사용되고 있는 보스턴다이나믹스의 4족 보행 로봇과 개발협력하는 국내 전문 기업의 로봇에도 해당 기술을 확대 적용해 나갈 예정입니다.
제철소에 특화된 로봇솔루션은 현장에서 처음부터 완전무결하게 작동하기가 현실적으로 어렵습니다. 사용하면서 발견하는 작은 오류들을 신속히 해결하고 계속해서 기능을 개선해야 신뢰도 높은 시스템을 구축할 수 있죠. 즉 현장 제철소 로봇화가 성공하기 위해서는 개발한 로봇솔루션에 대한 지속적인 유지보수가 중요하단 건데요. 이에 따라 로봇 솔루션 활용도를 높일 수 있도록 조업 정비부서와 긴밀히 협력해 나갈 것이며 실제 현장에서 시스템을 활용할 담당자를 대상으로 제철소 로봇 활용법과 유지보수 교육을 진행하는 등 제철소 로봇 전문 엔지니어 양성에도 힘쓸 예정입니다. 스마트 제철소 실현을 위한 포스코의 지속적인 도전에 응원을 보내 주세요!